Bazės-roverio matavimo metodas su GNSS imtuvu SP60 ir Android programine įranga Survey Mobile, detalizuota darbo eiga.
(Galimas trumpesnis pasiruošimo ir matavimo variantas. Tai galima realizuoti pasinaudojus sukurtais "matavimo profiliais" t.y. išsaugoti esamas matavimo konfigūracijas/nustatymus)
RTK Bazės paruošimas
Labai atviroje arba atviroje vietoje įrenkite bazinę stotį. Venkite netoli esančių aukštos įtampos perdavimo linijų, pastatų, medžių ar kitų objektų kurie sukelia trukdžius kokybiškam sat. signalų priėmimui.
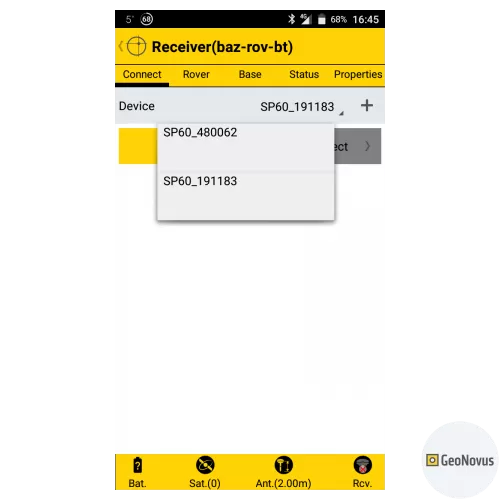
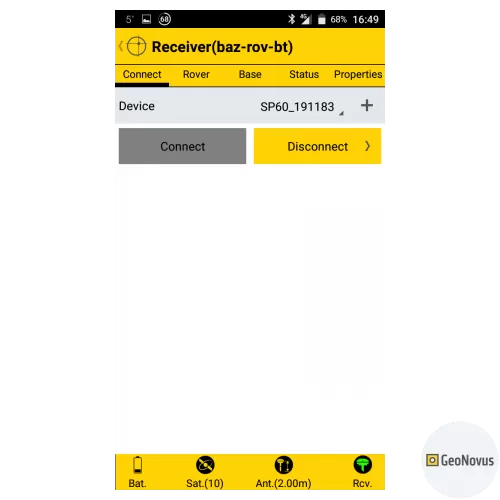
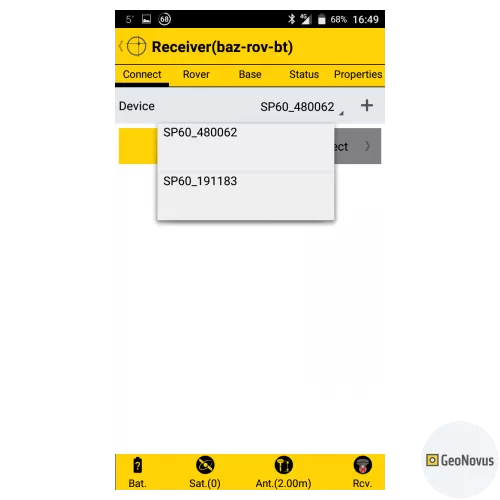
Sukurtame darbe pasirinkite RCV ir skiltelyje Connect, laukelyje Device pasirinkite bazinį/stacionarų imtuvą (jo serijos nr.).
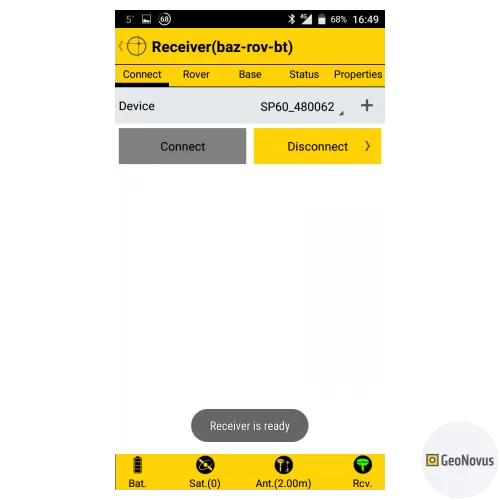
Paspauskite Connect mygtuką.
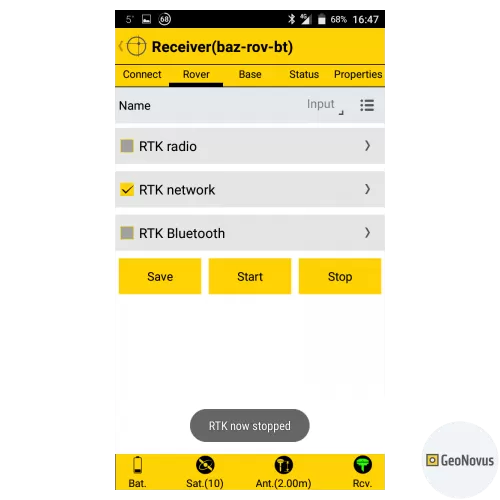
Prieš transliuojant korekcijas reikalingas „žinomas taškas“. Atlikite prisijungimą prie LitPOS tinklo.
Pasirinite Rover » RTK network » Start
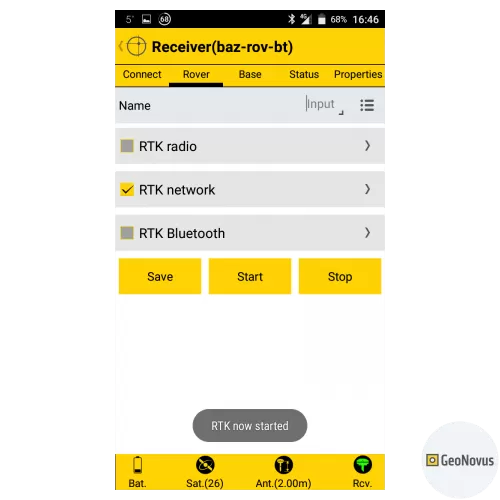
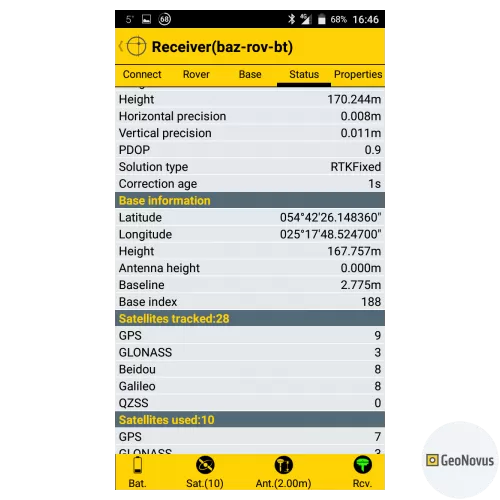
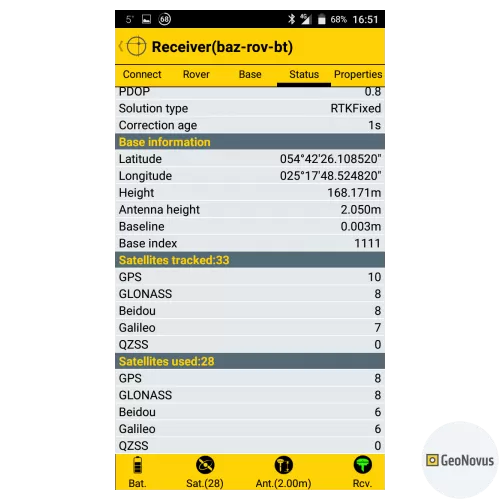
Kortelėje Status galite įvertinti būklę/tikslumą ir t.t.
Solution type turėtų būti RTKFixed
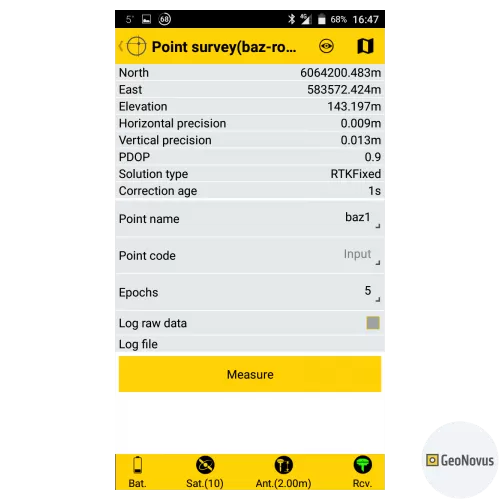
Atlikite vieno, bazinio taško matavimus.
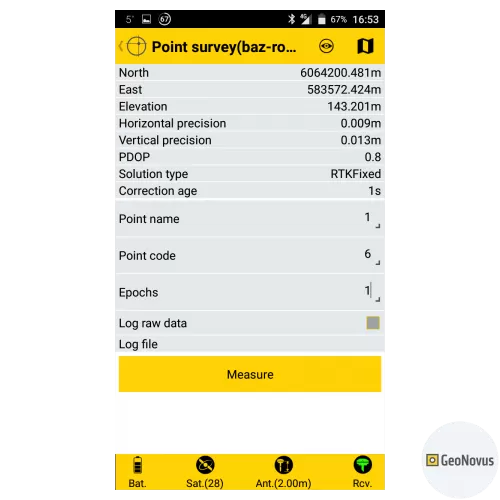
Pasirinkite Survey » Point survey
Bazinio taško pavadinimas turi būti aiškus ir nepanašus į kitus matuojamus taškus.
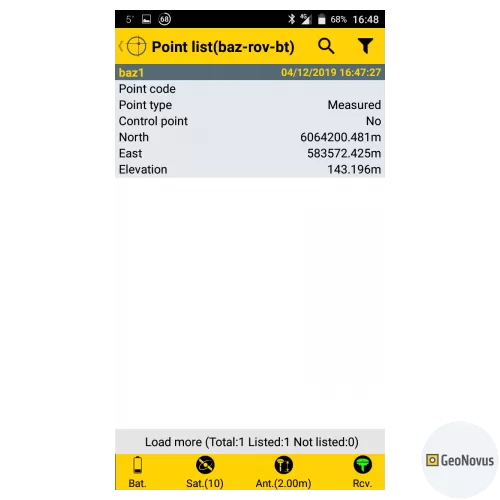
Suteikite matuojamam taškui pavadinimą (pvz.: baz1) ir jį pamatuokite/registruokite.
p.s.
Pageidautina, kad bazinio taško pavadinimas būtų unikalus, kad nesidubliuotu su matuojamais taškais t.y. nenaudokite tokių „paprastų“ pavadinimų, kaip: 1, 2, ..., 10, ...,100
Atsijunkite nuo LitPOS tinklo, bet ne nuo imtuvo.
RCV » Rover » Stop
Turint „žinomą tašką“ jau galima paruošti bazinę stotį (GNSS Base).
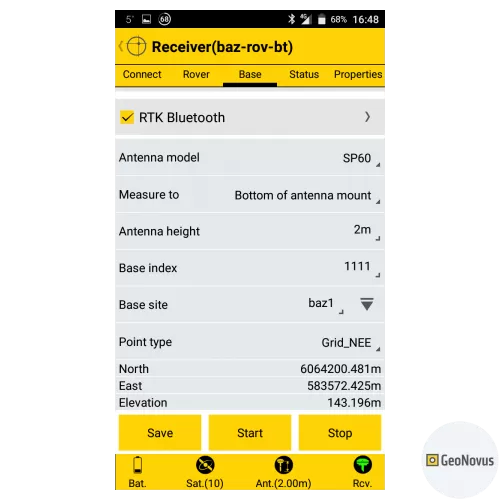
Pasirinkite Base » RTK Bluetooth
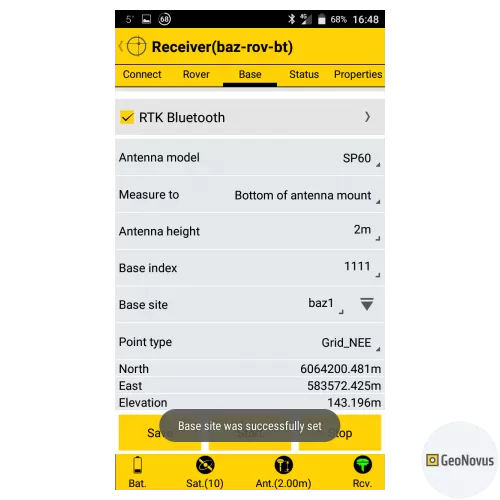
Įveskite reikiamus/būtinus parametrus Base site, pasirinkite sąrašo piktogramą.
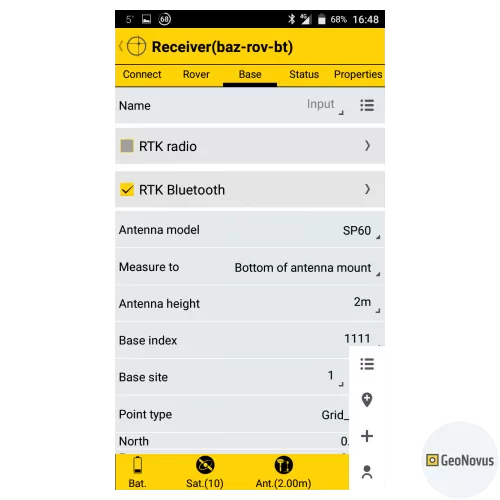
Pasirinkite bazinį tašką (nurodykite bazinio taško koordinatę).
Start mygtuko pagalba įjunkite/paleiskite bazinį imtuvą korekcijų transliavimui.
Bazė korekcijas turėtų transliuoti vienu iš šių formatų:
- ATOM standard
- ATOM compact
- ATOM super compact
„Bazė transliuoja“
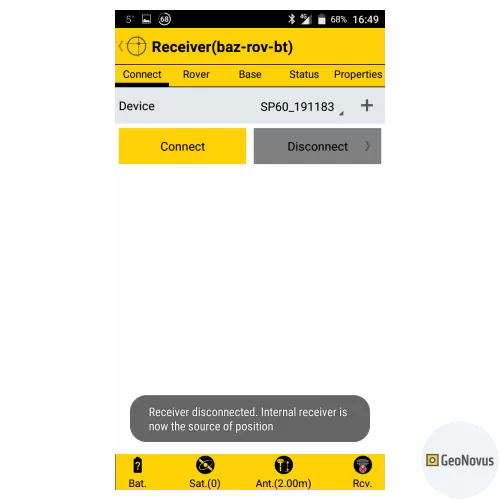
Duomenų kaupiklį atjunkite nuo bazinio imtuvo.
Pasirinkite Connect » Disconnect
RTK Rover paruošimas
Nueikite toliau nuo bazinio imtuvo.
Sujunkite GNSS imtuvą su duomenų kaupikliu/valdikliu.
Paspauskite RCV ir skiltyje Connect, laukelyje Device pasirinkite „rover“ imtuvą (jo serijos nr.).
Paspauskite Connect mygtuką.
Duomenų kaupiklis sujungtas su GNSS imtuvu.
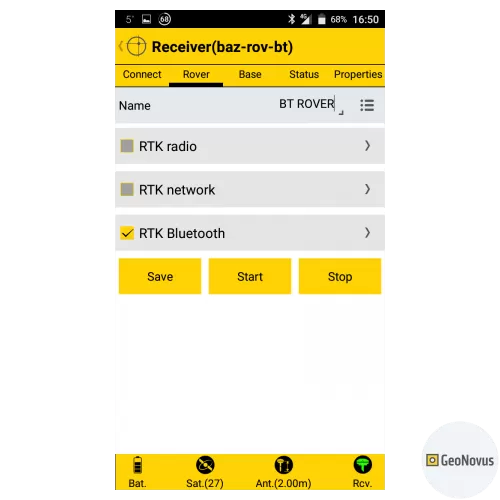
Pasirinkite Rover
Pastaba: galima naudoti išsaugotas konfigūracijas

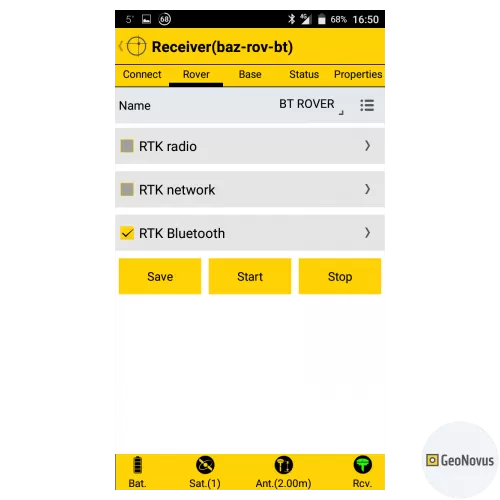
Kuomet bazė transliuoja pasirinkite Rover » RTK Bluetooth
Pasirinkite Scan
Vykdoma bazinio imtuvo paieška...
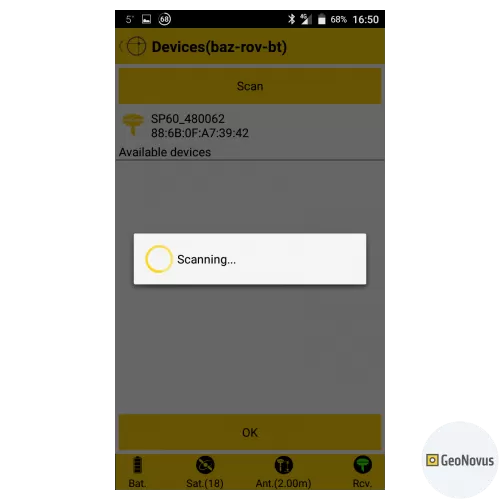
Pasirinkite bazinį imtuvą (bazinio imtuvo SN).
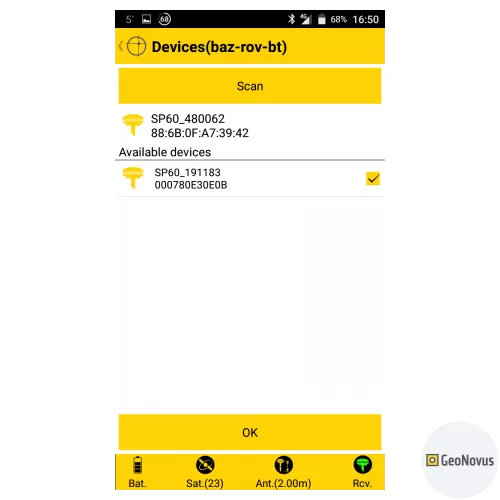
Norėdami tęsti paspauskite OK
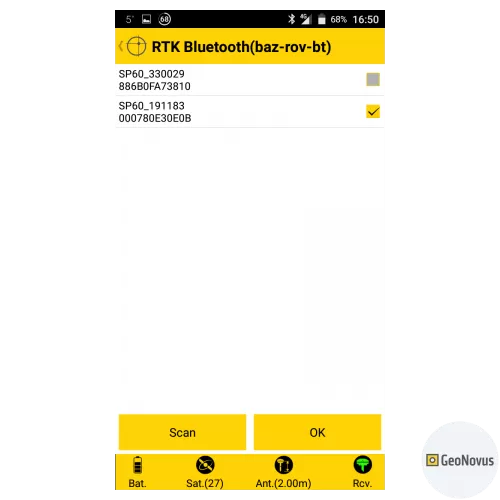
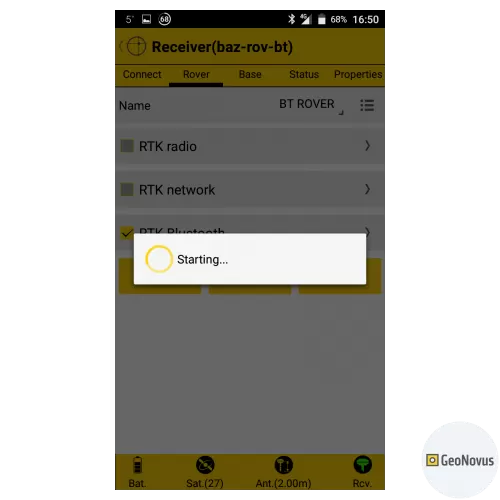
Norėdami tęsti paspauskite Start
„Rover“ (judrusis) jungiasi su „Base“ (statinis) imtuvu.
Kortelėje Status galite įvertinti būklę/tikslumą ir t.t.
Solution type turėtų būti RTKFixed
Atkreipkite dėmesį naudojantis savo baze imtuvas naudoja 28 palydovus, o ne ~10 kaip tai buvo tinkle (2019 metais).
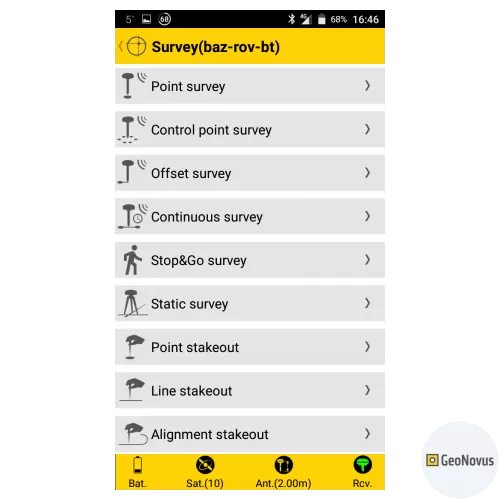
Galite atlikti įprastus matavimus.
Pasirinkite Survey » Point survey
Baigus objekto matavimus galite išjungti imtuvą.
Pasirinkite RCV » Connect » Disconnect » Ask for receiver shutdown and disconect

- 307 views